Search results for #CMUrobotics

Congratulations to Senior Systems Scientist Matt Travers and his students for winning "Best Academic/Research Institute Technology Demonstration" at the 2025 Ground Vehicles Systems Engineering and Technology Symposium (GVSETS)!🔥 #CMUrobotics

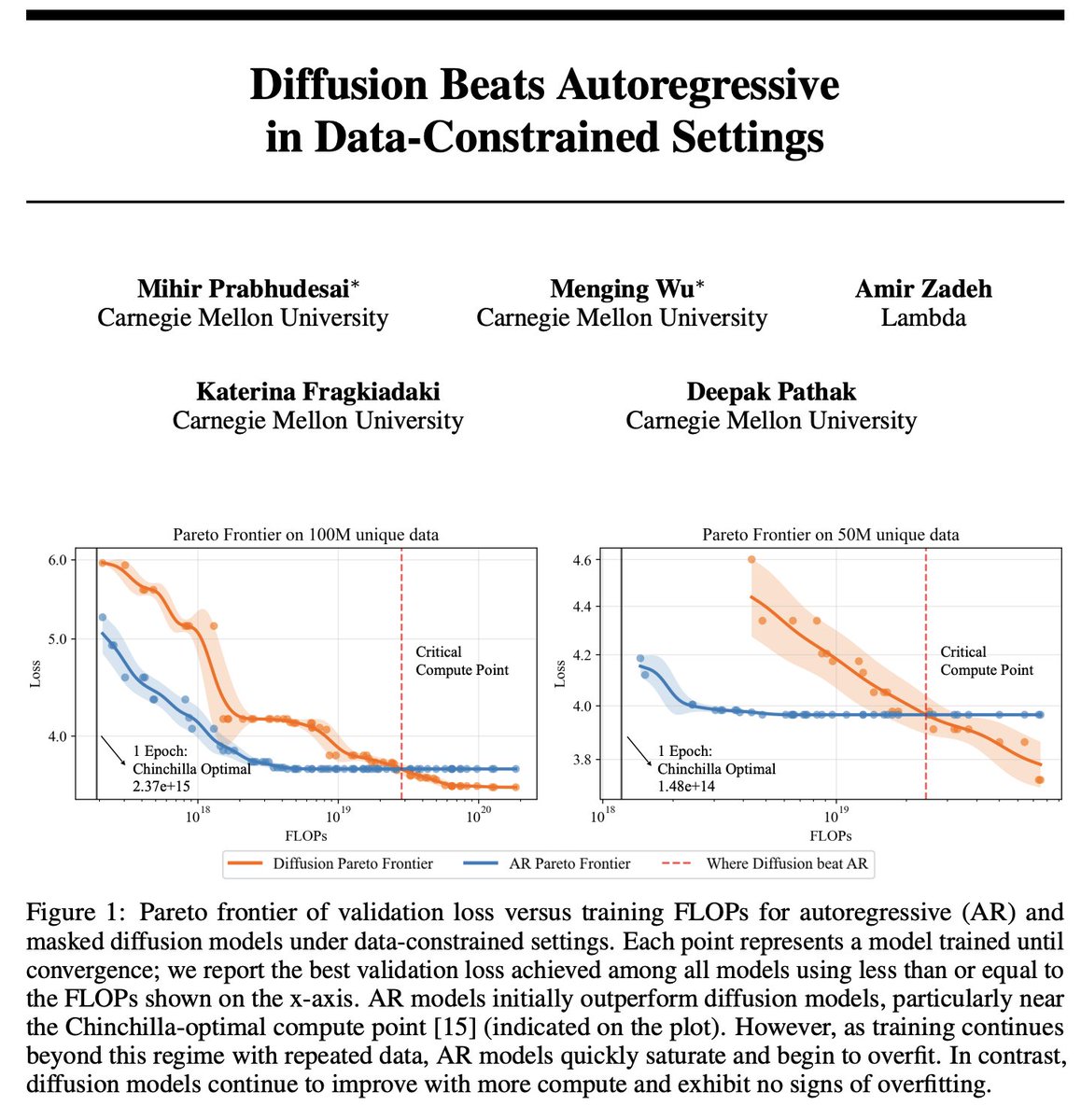
Check it out! 🚀 "Diffusion Beats Autoregressive in Data-Constrainted Settings" They show that Diffusion LLMs outperform Autoregressive LLMs, when allowed to train for multiple epochs! #CMUrobotics Work from Mihir Prabhudesai @mihirp98 & Mengning Wu @WuMengning54261

Check it out! 🚀 "Diffusion Beats Autoregressive in Data-Constrainted Settings" They show that Diffusion LLMs outperform Autoregressive LLMs, when allowed to train for multiple epochs! #CMUrobotics Work from Mihir Prabhudesai @mihirp98 & Mengning Wu @WuMengning54261
✈️ RI's Mitch Fogelson and Zac Manchester put their research to the test in zero gravity as part of a NASA Flight Opportunities campaign with @GoZeroG! They worked to create foldable structures for space deployment 🚀 #CMUrobotics Read and watch below: bit.ly/414Nt3w

ViSafe’s vision-only approach offers a lightweight, passive alternative that maintains strong safety performance, enabling broader deployment on agile, resource-constrained platforms. ✈️👀 #CMUrobotics Read the latest RI article covering the team's work! ri.cmu.edu/visafe-smarter…

ViSafe’s vision-only approach offers a lightweight, passive alternative that maintains strong safety performance, enabling broader deployment on agile, resource-constrained platforms. ✈️👀 #CMUrobotics Read the latest RI article covering the team's work! ri.cmu.edu/visafe-smarter…
Robots may struggle in cluttered scenes due to challenging occlusions 🤖🚧 RaySt3R is a new foundation model that predicts the full 3D geometry from a single view! 👇👇 #CMUrobotics

Robots may struggle in cluttered scenes due to challenging occlusions 🤖🚧 RaySt3R is a new foundation model that predicts the full 3D geometry from a single view! 👇👇 #CMUrobotics
It doesn’t stop there! Alongside the overall award, this team also won in the individual category, receiving a Best Student Paper award for the same work! #CMUrobotics #TartanProud
A quick (and important!) correction: Yuheng Qiu is the correct spelling of the first author’s name. Congratulations again to the full team on their #ICRA2025 Best Paper Award! #CMUrobotics @QiuYuhengQiu
#ICRA2025 alert! 🚨🥳 Congratulations to Yuheng Qui, Yutian Chen, Zihao Zhang, Wenshan Wang, and Sebastian Scherer on winning the Best Conference Paper Award for: "MAC-VO: Metrics-Aware Covariance for Leaning-Based Stereo Visual Odometry"! #CMUrobotics arxiv.org/abs/2409.09479

🚧 High-quality, diverse data is a major bottleneck in robot learning. 🌎🤲 DexWild offers a fast, scalable way to collect human demonstrations in-the-wild — unlocking real-world generalization for robots! #CMUrobotics

🚧 High-quality, diverse data is a major bottleneck in robot learning. 🌎🤲 DexWild offers a fast, scalable way to collect human demonstrations in-the-wild — unlocking real-world generalization for robots! #CMUrobotics
A team from Ji Zhang's lab at RI teamed up with @NREC_CMU to develop an off-road autonomous vehicle powered by their onboard autonomy software stack. See it in action on rugged trails! #CMUrobotics 💥🙌 Learn more about their autonomous exploration work: loom.ly/A_10H4E
News alert!🚨 The TartanDriver team at the AirLab created a new self-supervised autonomy stack that enables vehicles to safely traverse complex terrains with speed & accuracy without human intervention #CMUrobotics Read about this incredible work here: ri.cmu.edu/taking-autonom…
News alert!🚨 The TartanDriver team at the AirLab created a new self-supervised autonomy stack that enables vehicles to safely traverse complex terrains with speed & accuracy without human intervention #CMUrobotics Read about this incredible work here: ri.cmu.edu/taking-autonom…
🛻🌳 Autonomous Off-Road Driving – No Labels, No Prior Map, & No GPS! Our self-supervised stack enables an ATV to navigate forests, snow, & nighttime. (1/5) More details: theairlab.org/offroad/ Full video: youtu.be/7t4EQj8BIdY #cmurobotics #robotics #autonomy @CMU_Robotics
Ph.D. student @joehjhuang introduced NormalFlow, a real-time tactile-based 6DoF tracking algorithm! It enables reliable handling of low-texture objects while also benefiting other objects with more robust & accurate tracking. Read more below! #CMURobotics loom.ly/rqWXGFY
Heads up‼️ RI seminars are back underway for the spring semester! 🌷🤖 You can find the latest recorded talks from Andrea Bajcsy (@andrea_bajcsy) and Aaron Johnson on the CMU RI YouTube channel. Keep an eye out for more! ⬇️ #CMURobotics loom.ly/yAqLP-0
Read about ANAVI on our news site! ri.cmu.edu/acoustic-aware… #CMUrobotics 🚀🤖
Read about ANAVI on our news site! ri.cmu.edu/acoustic-aware… #CMUrobotics 🚀🤖


@elonmusk And Pittsburgh right up from #CMUrobotics

Next week, I'll be in Pittsburgh, visiting CMU Robotics Institute! I will be giving a talk on some of our recent works. If any friends or colleagues are around, let's connect. #CMURobotics #Networking @SCSatCMU


I can't wait to share my work at the @CMU_Robotics RoboLaunch workshop this upcoming summer! Come explore robotics with us! riss.ri.cmu.edu/robolaunch/ #robinrmurphy #cmurobotics #robolaunch2023 #workshop #robotics



