mattadc @mattadc
Joined July 2024-
Tweets33
-
Followers53
-
Following598
-
Likes177
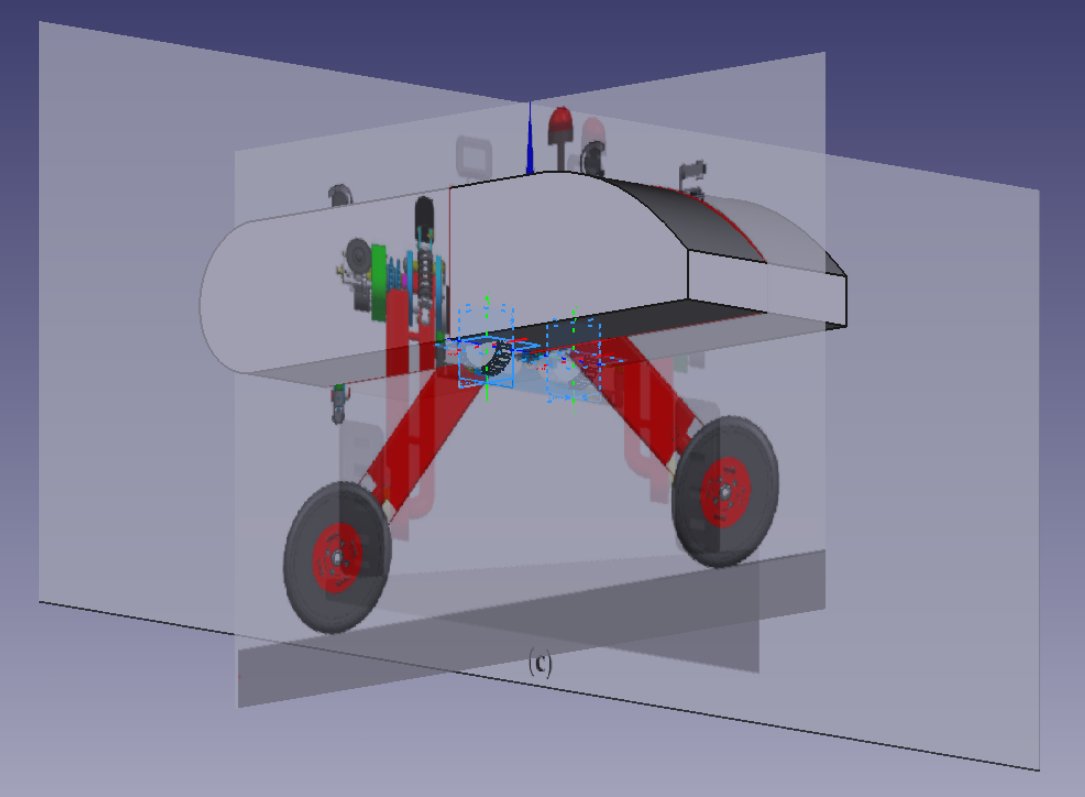
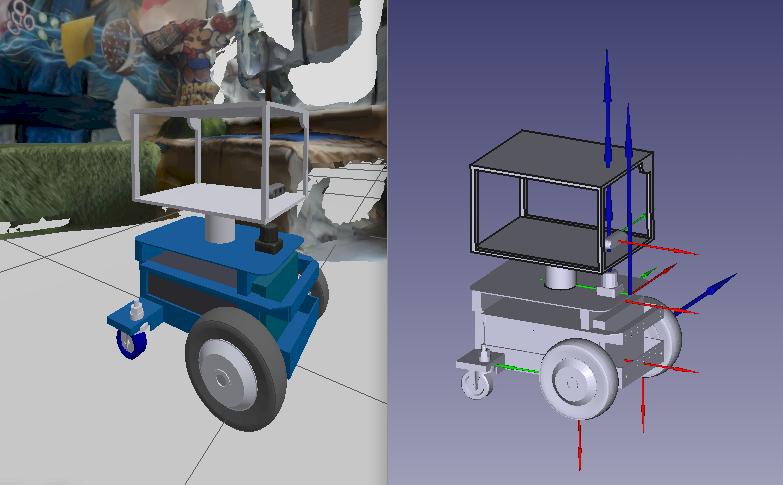
Day 19 learning robotics and ros. Building my own active suspension mobile robot in FreeCAD and CROSS workbench. Built a chassis, struts, and wheels. Having trouble getting the joints to all line up. Visualizing the whole robot is nice, but the placement UI is a bit challenging.
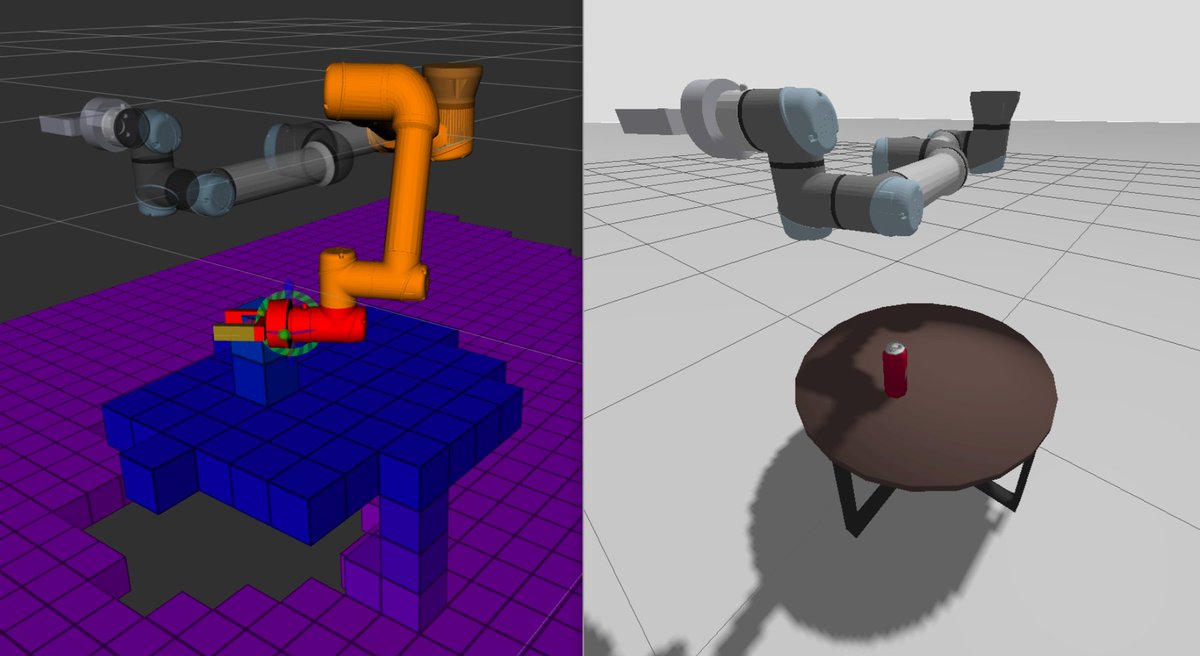
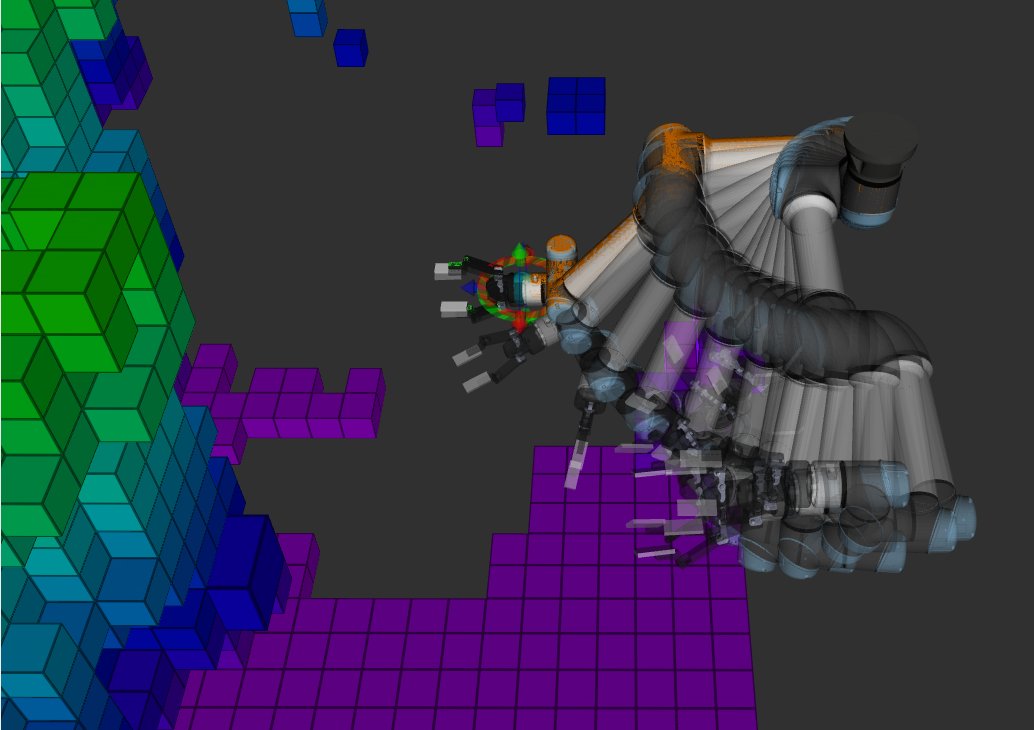
Day 18 learning robotics and ros. Connected the gazebo depth sensor to the planning environment makes octree of blocks for occupied regions where the sensor detects objects. Collision check between the blocks and the robot arm allows for collision free planning in the real world.
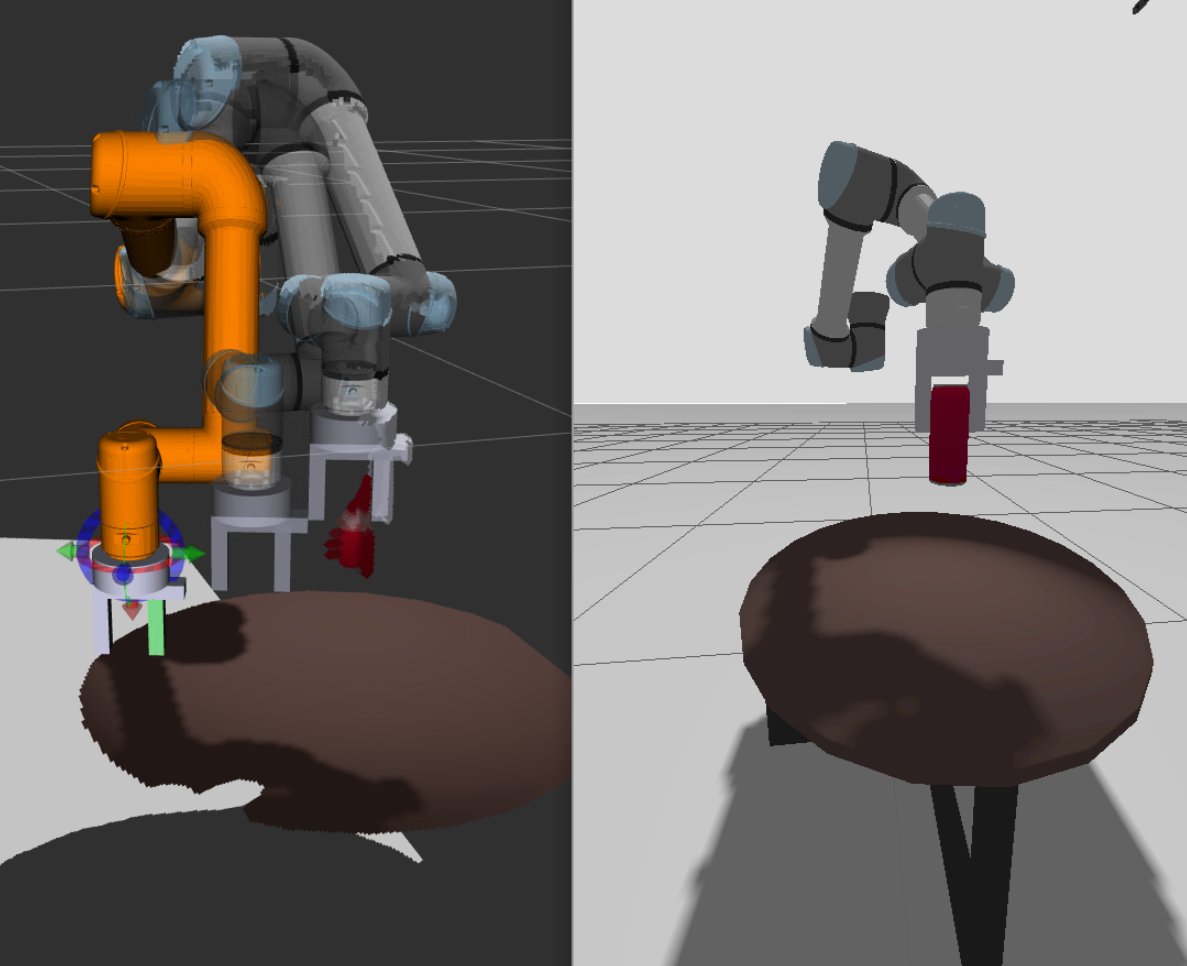
Day 17 learning robotics and ros. Lots of pieces coming together now as I added a simulated sensor to see my simulated robot. The planner (with some help from me) can see the virtual scene the same way it would on a real robot. Very cool. Even has physics for the gripper pickup.
Day 16 learning robotics and ros. This actually took more than a day because I was stuck. Joint limits on my model and planning limits and goal waypoint all being identical caused nothing to move but no useful errors. Finally got my arm and sim moving under roscontrol via moveit.
Day 14/15 learning robotics and ros. By far the hardest days so far. Between the sim, controller, and moveit planner, there are tons of config variables that need to be set properly and match in order for the system to communicate. Tools for configuration flow seem to be lacking.
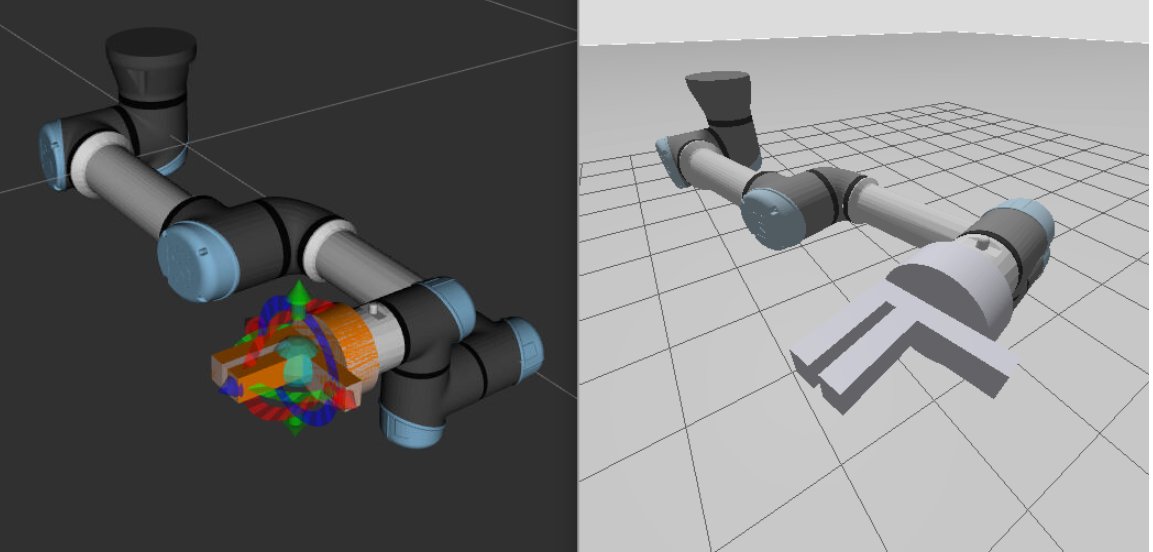
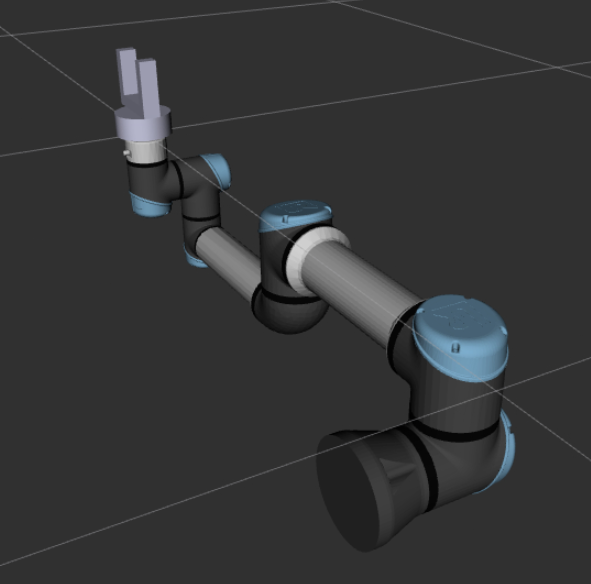
Day 13 learning robotics and ros. Successfully modified a standard robot by adding my own custom gripper. Really enjoying Xacro as a method for chaining existing components, but also as a way for simplifying repeated operations, like inertia blocks, within existing robot models.
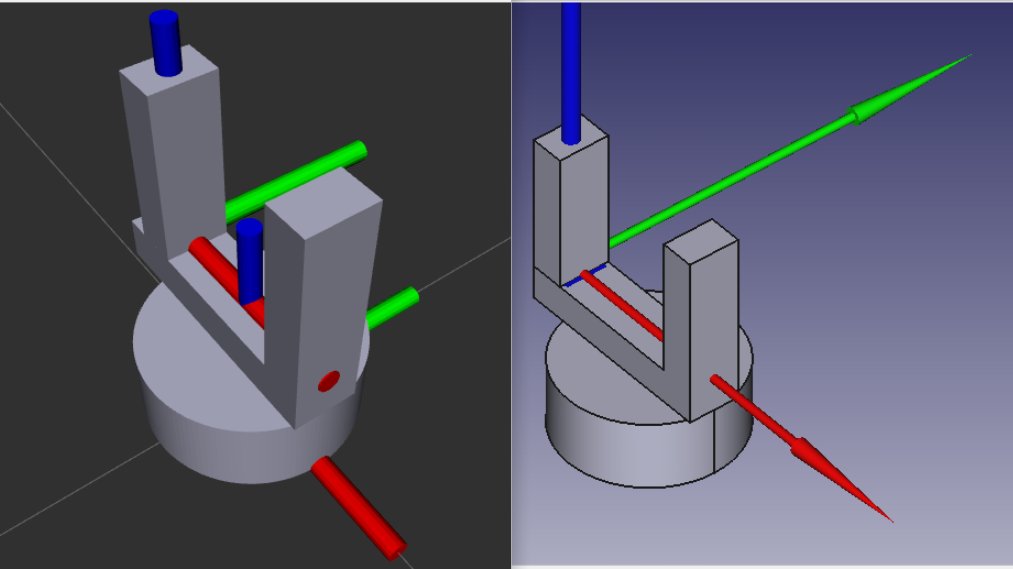
Day 12 learning robotics and ros. Back in FreeCAD to modify my robot by building a custom gripper. Smooth transition from CAD to Gazebo thanks to CROSS Workbench. Really helpful to see visual rep of frames and joints in CAD to debug before doing the whole export process.
Day 11 learning robotics and ros. Small detour today to focus on exploring nodes and how they talk with topics, services, and actions. I wish there were better tools for this. The old rqt_graph tool from the ros1 days doesn't render well. Or are these graphs always a big mess?
Day 10 learning robotics. Switching over to arms now. Amazing how much functionality is available for free to drive an arm. Kinematics, collision free planning, sensor integration, GUI tools for defining tasks, scripting. All available free out of the box.
Day 9 learning robotics. Doing some research into an interesting robot to model from scratch and simulate doing something useful. I'm thinking that some sort of active suspension wheeled robot is a good step up from the basic mobile base. Probably not gonna go with the balancer.

Day 7/8 of learning robotics and ros. Everyone talks about the sim-to-real problem, but for beginners the cad-to-sim is often a big barrier. Learning about urdf and model import and using the FreeCAD CROSS workbench to visualize models and make it easier to modify and update sims
Day 6 learning robotics and ros. Driving via nav2 and programmatically generated drive targets (no gui). Great when it works. When it doesn't, though, it does highlight the problem of "where do I even start" to debug when things don't go as planned. Need lots logging on cmd side.
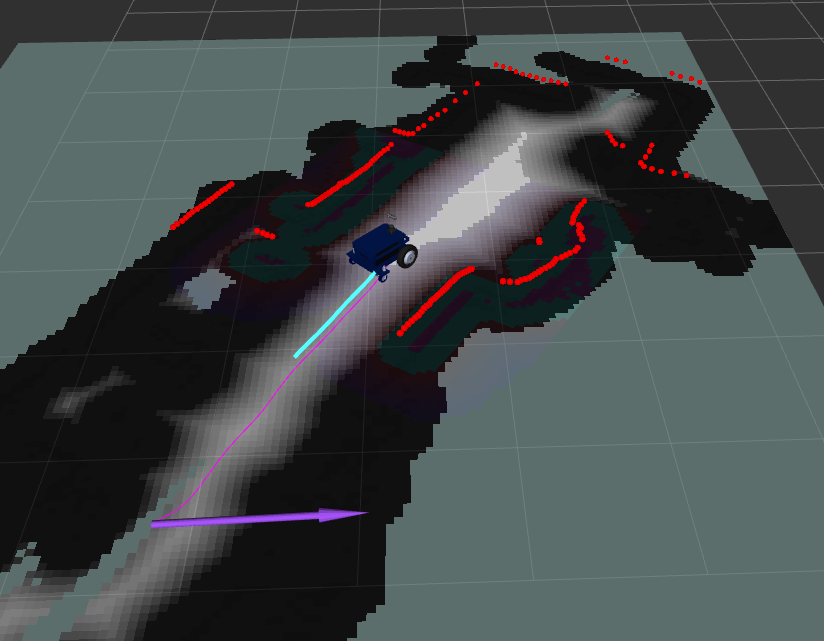
Day 5 of learning robotics and ros. Testing autonomous driving with nav2. Because so much amazing functionality exists already, it's an interesting teaching modality to show the entire workings of a complex system and then peel back the layers to see how it's done. I love it.
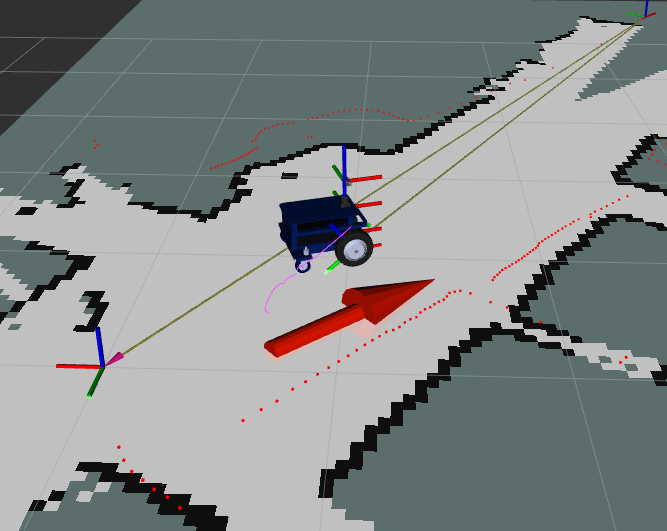
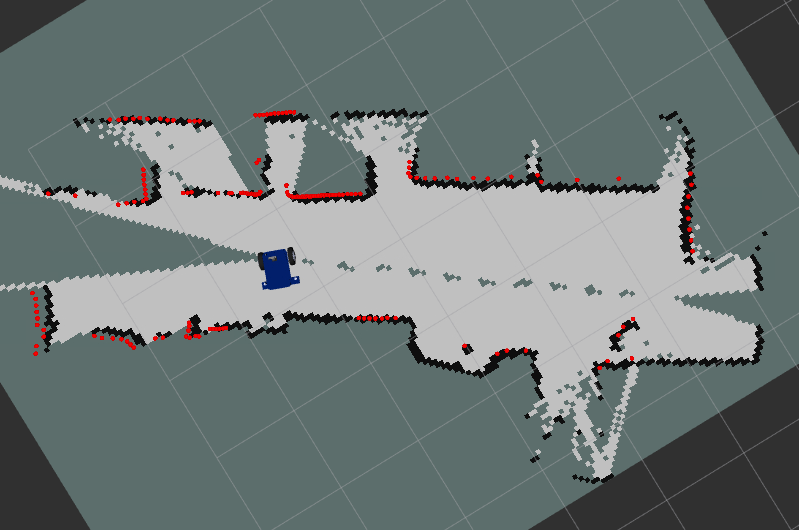
Day 4 of learning robotics and ros. Jumping into the SLAM toolbox to drive around in gazebo and look at how the work gets mapped by lidar. Good to see a realistic application. The the map frame jumps around a lot as I drive. It also gets completely broken if I bump into anything.
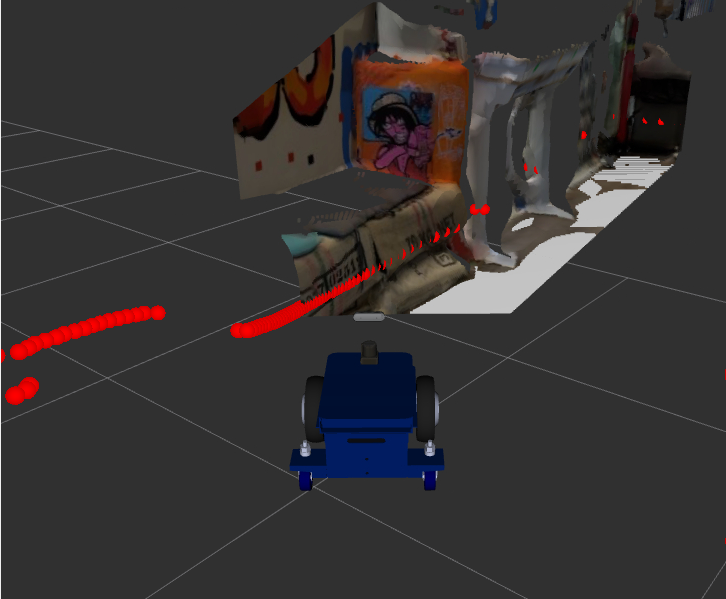
Day 3 of learning robotics and ros. I don't care if it's not perfect, Rviz is great. I love seeing my sensor data from different sensors line up perfectly. Sure, it might be cheating since it's in simulation, but at least we know what we're shooting for on the real hardware.
Day 2 of 28 learning robotics and ros. Poking around under the hood with topics, nodes, message types and the like. Despite the fact that I've been doing this for a while I was suprised to finally notice that ros params are just a wrapper on a set of service calls.
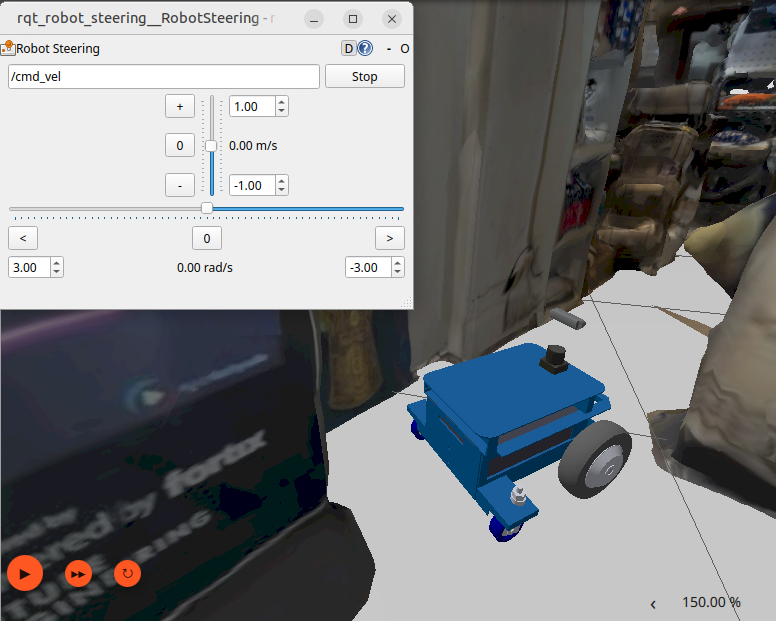
Day 1 of a 28 day learning robotics challenge. Day 1 involved teleop of a wheeled robot in gazebo. While the teleop interface is crude, I appreciate the tight coupling of the GUI to the raw message types. Really helps understand how and what is flowing where.
I'm starting a 28 day robotics programming challenge today. If any of my followers have advice for good, small, standalone coding projects for robotics engineers, I'm all ears.

Lydia @6YNs8pcS37DKsO
9 Followers 795 Following



Marcos Sagrado @msagrado
553 Followers 891 Following Happy working with TPNET/@MuyComputerPRO, dad of 3 incredible children & with the perfect partner. What else to desire?
machinesynthesis @machinesynth
92 Followers 396 Following
Joel @joeljacob4452
189 Followers 3K Following Just helping robots think better @strider_robo | Robotics, data science & space tech
muchslowerthanbefore @theenginefeelgo
0 Followers 313 Following
Zeke @zeketronics
115 Followers 236 Following Engineer, writer, tinkerer, explorer Plays hard, works harder Will math for beer
Kirill @iamMarkelov
18 Followers 406 Following
t @tsr_bt
0 Followers 221 Following


Milinda Lakshan @MiliR84
12 Followers 378 Following
Omar Perez @Dinopugthegamer
0 Followers 141 Following
J @YaBoyJRichy
15 Followers 1K Following He / Him Trans rights are human rights. Musk purchased this platform to undermine democracy and human rights. Use of platform does not constitute endorsement


Common Cents @_JustCents
82 Followers 941 Following Rocket Scientist, AFG war vet, American by choice, Passive Income Chaser, Likes & RT ≠ Endorsement!
StevePurpose @PurposeOf1
292 Followers 1K Following

Adith Kumar Urs @adithkumarurs
21 Followers 2K Following
Paul Ehimen @_paulo_29
32 Followers 232 Following


Subhransu Mishra @subhransu_ro
122 Followers 1K Following Working on path, motion and mission planning for aerial robots and previously for small ground robots. Also love robot hardware design. Ph.D. Johns Hopkins.
Open Robotics @OpenRoboticsOrg
39K Followers 2K Following Our mission is to support development, distribution, and adoption of open source software like #ROS and #Gazebo for use in the robotics industry. Formerly OSRF.
Matt Herzog @mattherzogx
537 Followers 2K Following
Tom Primožič 🪐�... @tomprimozic
410 Followers 2K Following optimist, programmer, mathematician interested in health, longevity, biotech, AI, space, robotics
JaanV @its_jaanV
25 Followers 375 Following 🌱 Lifelong learner | Exploring ML & AI 🤖 | Building my first startup 🚀 | From learning to creating, one step at a time!

vinodmadhurantakam @vinodmadhu6
28 Followers 658 Following


Isidoros Marougkas @is_marou
1K Followers 6K Following PhD candidate@Rutgers University,NJ in AI&Robotics
Lucas Medino @lmoreiramedino
127 Followers 967 Following Machine Learning Engineer. Sport Club do Recife and Warriors fan. Always Learning. 🏀⚽️🏈

Surabhi Gupta @this_is_surabhi
3K Followers 4K Following 21 • building a home assistant robot • fellow @localhostIND • robotics intern @EarthSense_Inc • grantee @_buildspace
Dr. John Vial @JohnVial
2K Followers 584 Following Small Robotics Tips For Beginners | get started at https://t.co/iP4GxyJplX | PhD In Robotics
ss92 @ssbits90
14 Followers 4K Following
Peter Wallhead @peterwallhead
1K Followers 1K Following Embedded systems developer, hardware hacker and tech industry enthusiast.
Daniel @Nimodo_14
5 Followers 1K Following
Manuel Albert @manuelalbertcom
678 Followers 1K Following Lead 3D-Design & Visualization at https://t.co/z7u2oRAkW7. Blender, 3D-Design, Animation, Illustration & Film enthusiast/professional (:
Huinker @Huinker7
18 Followers 1K Following
micah @wasoncemicah
476 Followers 414 Following robotics + cgi enthusiast. engg phys student @UAlberta. fervent in spirit.
Momiji @Momiji894846644
30 Followers 331 Following 経営者/個人投資家/資産家。昔、会社経営に失敗し多額の借金を抱える、諦めずに再度起業し複数の会社経営。今は有益情報を教えたり、自分がお金に苦労した経験からお金に困窮している方を助けたいと思い、小規模ですがお金配り企画をしています☆ なくなり次第終了➡https://t.co/XoxJvjFhwr
Zixuan Chen @C___eric417
402 Followers 285 Following Incoming PhD at @UCSanDiego; Bachelor's Degree at @FudanUni
New York Robotics @nyrobotics
123 Followers 100 Following Powering the robotics ecosystem in the New York City Metro Area.
Standard Bots @standardbots
1K Followers 47 Following Hardware and software that push collaborative robotics forward.
Vanar Robots @vanar_robots
4K Followers 1 Following We are building a new species that would help us do wonderful things for humanity.
Plaud @PLAUDAI
3K Followers 49 Following https://t.co/3gNYdM5MVH is the world's No. 1 AI note-taking brand, trusted by over 1 million users worldwide. Follow for Plaud Intelligence updates. #AI #Productivity
lightcell energy 🔆 @lightcellenergy
2K Followers 31 Following ultra power dense electric generator using light. portable dyson spheresROS-Industrial @ROSIndustrial
11K Followers 315 Following An open-source project focused on bringing the Robot Operating System (ROS) to manufacturing applications
Jeff Foust @jeff_foust
100K Followers 1K Following Senior writer, @SpaceNews_Inc. Tips? DMs open, email [email protected], or on Signal: jfoust.58. Also @jfoust.bsky.social.
General Fabrication C... @genfabco
4K Followers 0 Following We make the machine that makes the machines.
Matt Herzog @mattherzogx
537 Followers 2K Following

Parth Ingle @parthingle_x
3K Followers 1K Following Full Stack Robotics Corporation @saturnroboticsx DMs open
Angus (dirtman) @terrorproforma
12K Followers 3K Following 420.69x engineer. director of the techno-optimist propaganda department. the future is stored in the balls BUY MY ROBOT at https://t.co/716Dv2MArX
Shabnam Parveen @shabnam_774
15K Followers 160 Following AI Enthusiast • 45k On LinkedIn -Open for promotion • Helping Brands to grow • Content Creator. 📩 Dm for collaboration
Gazebo Simulator @GazeboSim
6K Followers 165 Following Gazebo is a leader in robot simulation. Maintained by @OpenRoboticsOrg and good friends with @rosorg! Support: https://t.co/7sIsIXS07i
Jiafei Duan @DJiafei
4K Followers 927 Following CS PhD student @uwcse|Researcher @allen_ai |Ex-@NVIDIA 🇸🇬
MacCallister Higgins @macjshiggins
9K Followers 3K Following click clack keyboard man @pipedream_labs. cofounded @voyage, built drones for amazon and larger drones for the army. hyperspectral sensing enthusiast. KC3YLJ
Haitham Bou Ammar @hbouammar
4K Followers 380 Following RL team leader @Huawei R&D UK H. Assistant Professor @UCL | Ex-@Princeton, Upenn (thou/thine)

RoboPapers @RoboPapers
2K Followers 2 Following @chris_j_paxton & @micoolcho geeking out weekly with authors of robotics AI papers. On YouTube / X / Spotify
MapScaping @MapScaping
37K Followers 115 Following The MapScaping Podcast is a #podcast for the #geospatial community. Just search for "MapScaping" Wherever you get your podcasts!
Qiusheng Wu @giswqs
46K Followers 4K Following Associate Professor @UTKGeography | @Amazon Scholar | Talk about #opensource #geospatial #dataviz #EarthEngine
Terraform Industries @TerraformIndies
18K Followers 866 Following We make cheap natural gas from sunlight and air
GitHub @github
2.6M Followers 327 Following The AI-powered developer platform to build, scale, and deliver secure software.
Jeff Atwood @codinghorror
267K Followers 2 Following Indoor enthusiast. Co-founder https://t.co/e62S5uByfO / https://t.co/Tuh5wHPHTI. Let’s be kind to each other. I am no longer on twitter. Find me @[email protected]

Ishan @radshaan
20K Followers 5K Following Proprietary technology salesperson To latch onto an exponent and never let go
Divya Saini @dibbaa_code
5K Followers 532 Following Building useful things :) Adulting Buddy - https://t.co/dYXVZzr1ci Dance Buddy - https://t.co/gQBSrfeacz @joinodf | ship-it @fdotinc | @_buildspace s5 winner
Riley Meik @rileymeik
990 Followers 536 Following industrializing american home building • prev building rockets as cofounder @evolutionspace_ and starship manufacturing @spacex
Santiago Del Solar �... @SantiagoDs_001
2K Followers 390 Following Inventor in the making… | Made in @socraticainfo | Founder of @InventorsF | Project Exo-ranger
Pi-hole Remote @PiHoleRemote
2K Followers 7 Following The #1 Pi-hole statistics & management tool. Available for iOS, iPadOS, watchOS, tvOS, and macOS | Made with ❤️ by @joost_akker 🇳🇱
Kasra Khosoussi @KasraKhosoussi
2K Followers 2K Following Roboticist • EECS @UQ_News • ex @CSIRO, @MITLIDS @MITAeroAstro
Lerrel Pinto @LerrelPinto
8K Followers 204 Following Making robots more dexterous, robust and general. Co-founder of Assured Robot Intelligence (ARI) | Prof @nyuniversity
Greg Koenig @gak_pdx
11K Followers 1K Following Follow me on Twitter! You'll go where I go, defile what I defile, eat who I eat. He/Supreme Allied Machine Commander
nagy @okthisisnagy
5K Followers 1K Following the walls between art and engineering exist only in our minds
Ashish Kapoor @akapoor_av8r
5K Followers 364 Following Building general purpose robotics intelligence @genrobotics_ai | Aviator

Jonathan McDowell @planet4589
166K Followers 5K Following Astronomer commenting on space launches. Orbital Police. Personal account. All plots CC-BY. @planet4589 on Ma, bsky, etc.
Faraz Khan @faraz_r_khan
3K Followers 2K Following Building a modern kid carrying electric scooter for American cities. Former @screenhero founder previously at @slackhq, @voyage and @covariantai.
Space Scout @WeAreSpaceScout
3K Followers 91 Following Dedicated to providing accurate reporting, new perspectives, and amazing visuals of all things space. 🚀🛰

Turing Pi @turingpi
21K Followers 242 Following From homelab and edge AI to local LLMs, Turing Pi handles it all. Datacenter-level compute in a desktop design. Join the community https://t.co/Siv6YvvCYO

Dr Kareem Carr, Stati... @kareem_carr
172K Followers 350 Following Statistician. PhD @Harvard • Follow me for fun, nerdy content • Author of the Vital Statistics newsletter (link in bio)

Luke's Laboratory @LukesLaboratory
2K Followers 145 Following Luke's Laboratory is a manufacturer of premium high performance 3d printer parts and 3d printers, specializing in production, manufacturing, and service!
Todd Master @MasterActual
4K Followers 1K Following COO @umbraspace doing face melting SAR and mind bending space systems.
Martian Potato @rad_hardened
823 Followers 452 Following nuclear roboticist & personality hire @ Radiant · former spacecraft whisperer @ SpaceX · you can just do things · my views don’t reflect my employerTrends for United States
You might like