Max Simchowitz @max_simchowitz
Assistant Professor @mldcmu. Formerly: Postdoc @MITEECS, PhD @Berkeley_EECS, Math Undergrad @Princeton. New to Twitter. https://t.co/67bMOAyqK6 Joined May 2024-
Tweets72
-
Followers1K
-
Following105
-
Likes242
👏👏This is pretty massive!! Generative modeling looks clean in math, but getting it up and running can require a fair bit of alchemy. 🧪🧪 Thankfully, Nick Boffi (co-creator of Stochastic Interpolants) just dropped a super-clean, super-fast, super-reproducible repo for core…

👏👏This is pretty massive!! Generative modeling looks clean in math, but getting it up and running can require a fair bit of alchemy. 🧪🧪 Thankfully, Nick Boffi (co-creator of Stochastic Interpolants) just dropped a super-clean, super-fast, super-reproducible repo for core…


TRI's latest Large Behavior Model (LBM) paper landed on arxiv last night! Check out our project website: toyotaresearchinstitute.github.io/lbm1/ One of our main goals for this paper was to put out a very careful and thorough study on the topic to help people understand the state of the…
Very cool! In addition to optimizing inference-time search as a learning desideratum, this really speaks to power of building reward models purely from expert trajectories, via discriminative objectives. Excited to see how far this can go!

Very cool! In addition to optimizing inference-time search as a learning desideratum, this really speaks to power of building reward models purely from expert trajectories, via discriminative objectives. Excited to see how far this can go!

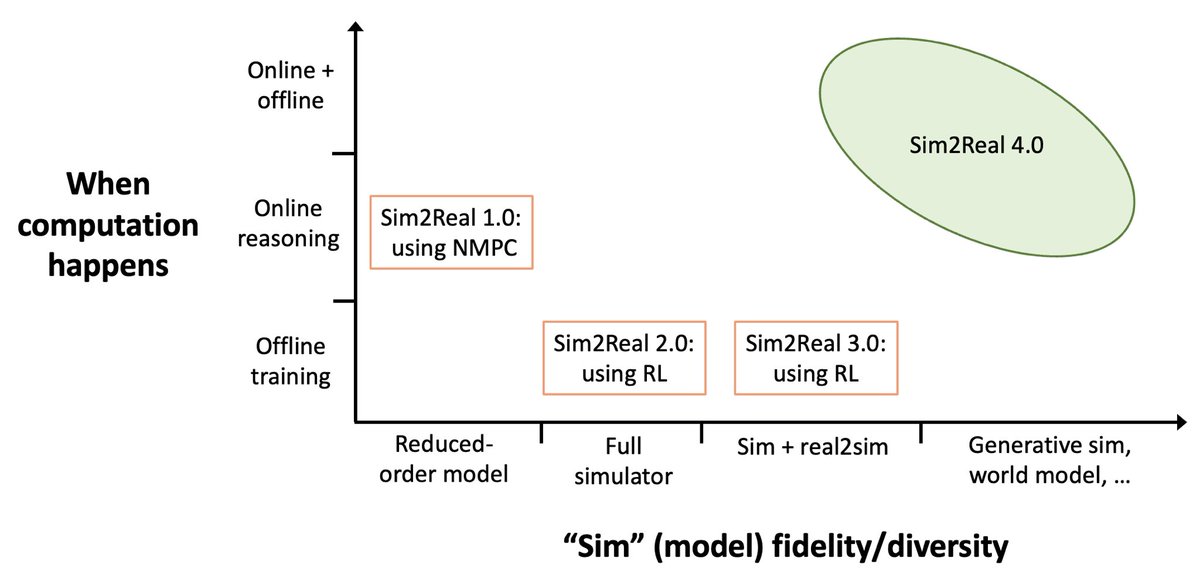
I am giving a talk "From Sim2Real 1.0 to 4.0 for Humanoid Whole-Body Control and Loco-Manipulation" at the RoboLetics 2.0 workshop @ieee_ras_icra today, summarizing my recent thoughts on sim2real. If you are interested: 2pm, May 23 @ room 302.

Want to scale robot data with simulation, but don’t know how to get large numbers of realistic, diverse, and task-relevant scenes? Our solution: ➊ Pretrain on broad procedural scene data ➋ Steer generation toward downstream objectives 🌐 steerable-scene-generation.github.io 🧵1/8

RL and post-training play a central role in giving language models advanced reasoning capabilities, but many algorithmic and scientific questions remain unanswered. Join us at FoPT @ COLT '25 to explore pressing emerging challenges and opportunities for theory to bring clarity.
RL and post-training play a central role in giving language models advanced reasoning capabilities, but many algorithmic and scientific questions remain unanswered. Join us at FoPT @ COLT '25 to explore pressing emerging challenges and opportunities for theory to bring clarity.


The Chicago Pope implies the existence of a New Keynesian Pope and a Behavioral Pope
really excited about this one -- please submit your best work, and come join us in beautiful Lyon to talk about machine learning and science!
really excited about this one -- please submit your best work, and come join us in beautiful Lyon to talk about machine learning and science!
Congrats to Andrea Bajcsy (@andrea_bajcsy) on receiving the NSF CAREER award! 👏 Her work: “Formalizing Open World Safety for Interactive Robots,” explores how robots make safe decisions beyond collision avoidance. Read about it and her education plans: loom.ly/59evuD0

Building AI systems is now a fragmented process spanning multiple organizations & entities. In new work (w/ @aspenkhopkins @cen_sarah @andrew_ilyas @imstruckman @LVidegaray), we study the implications of these emerging networks → what we call *AI supply chains* 🧵

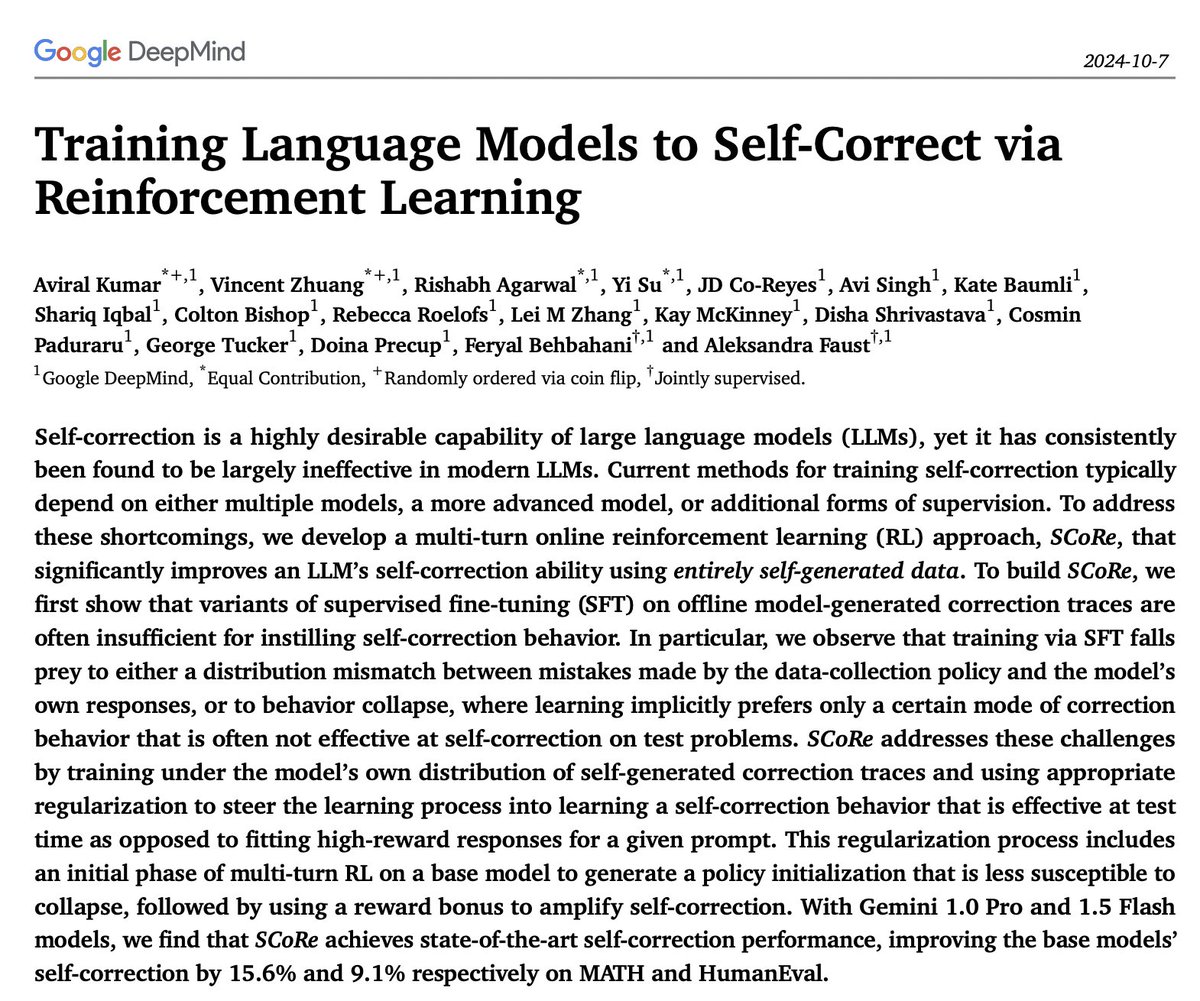
Before the (exciting) workshops on Sun, catch Vincent’s oral talk at the #ICLR2025 main conference on this paper today at 3:30pm, Hall 1 Apex! And don’t forget to talk with the co-leads Vincent and @YiSu37328759 at the poster 10 a.m - 12:30 p.m Hall 3 + Hall 2B #558.
Before the (exciting) workshops on Sun, catch Vincent’s oral talk at the #ICLR2025 main conference on this paper today at 3:30pm, Hall 1 Apex! And don’t forget to talk with the co-leads Vincent and @YiSu37328759 at the poster 10 a.m - 12:30 p.m Hall 3 + Hall 2B #558.

So excited for this!!! The key technical breakthrough here is that we can control joints and fingertips of the robot **without joint encoders**. Learning from self-supervised data collection is all you need for training the humanoid hand control you see below.

So excited for this!!! The key technical breakthrough here is that we can control joints and fingertips of the robot **without joint encoders**. Learning from self-supervised data collection is all you need for training the humanoid hand control you see below.

Harman Marshal Singh @HarmanMarshal
19 Followers 129 Following I know the answer but not the question. SDE @amazon | Math & CS @BITSPilaniGoa
Adam Falls @AdamFalls172137
56 Followers 4K Following

Partha Kaushik @k4sncdrnng
1 Followers 248 Following
Zhihao Yuan @yuan82829
0 Followers 171 Following

Karan Singh @letmechnageuser
2 Followers 123 Following @ CMU // Princeton, Microsoft Research in the past

savoji @saavoji
49 Followers 624 Following Senior AI Researcher @ Huawei Noah’s Ark Lab | Affiliate Researcher @ Vector Institute | Affiliate Researcher @ CVR
Rohan Nagabhirava @_RohanNaga
125 Followers 175 Following 21 | AI @CarnegieMellon | ODF26 | Building: https://t.co/MPkBqZUrZg, https://t.co/AwUi8z4siv
Genghis Luo @GenghisLuo
5 Followers 88 Following
Alexiy Buynitsky @ABuynitsky
62 Followers 778 Following CS @UCSanDiego | ex Persona AI, SpaceX, Armada AI | CS, Math @ Purdue '25

Anurag Ajay @aajay3110
269 Followers 424 Following Building Astra, Gemini p13n @GoogleDeepMind. Prev: @MetaAI. PhD @MIT. Opinions my own.
Jill @owoli_
8 Followers 178 Following
The Bishop of Math @thebishopofmath
1 Followers 691 Following

Mo💜 @mo_eastbay
51 Followers 123 Following HR/Recruiting Professional in Tech | Mom to 2 daughters | 🇯🇵🇺🇸

SUNHO KIM @sunho_kim41325
3 Followers 199 Following
degen_bobo 🤖💎 @agostino90
633 Followers 4K Following
zhaoyu zhu @Zhaoyu_Zhu_
0 Followers 340 Following
Zhefei Gong @zhefeigong
141 Followers 2K Following Robot Learning | Looking for 2026 Spring/Fall Phd Opportunities
SABEEH @MElkton54569
178 Followers 8K Following Passionate about AI 🤖, ML 🧠, AGI 🌐, ASI 🚀, and robotics 🤖. Never lose hope in God's mercy 💫. AI Engineer Microsoft He studies at MIT. Free Palestine 🇵🇸

Anshuman Chhabra @nshuman_chhabra
123 Followers 623 Following Assistant Professor of Computer Science at the University of South Florida. Director @ PALM Lab (https://t.co/8JL5dxASsj).
omid @omid_2015p
4 Followers 390 Following
Triston Hickle @HickleTris6636
82 Followers 4K Following
Daphne Cornelisse @daphne_cor
1K Followers 553 Following Ph.D. student @nyuniversity • Building human-like agents 🦋 https://t.co/BhKiCutsdY
Zhengtong Xu @XuZhengtong
428 Followers 1K Following PhD candidate @LifeAtPurdue. Embodied AI and Robotics.
Homanga Bharadhwaj @mangahomanga
2K Followers 861 Following Research Scientist @AIatMeta Prev: PhD @CMU_Robotics MSc @UofT BTech @IITKanpur. Hater of hot takes. Lover of analyses.
Xingtu Liu @MLtheory
70 Followers 196 Following Reinforcement Learning & Machine Learning Theory. Master’s Student @SFU_CompSci, Undergrad @UWaterloo.
Ipsit Mantri @SriIpsit
487 Followers 6K Following Research Intern @INSIGHTLabBGU || Interned @SonyAI_global Tokyo || MS'25 @PurdueCS || CMMRS'23 || BTech EE'22 @IITBombay

Samra (Sam) @Sam14_irshad
27 Followers 733 Following PhD candidate @ Kyung Hee University —Trying to find sweet spots.

HUANG Qichang @huang85993
358 Followers 7K Following
Hung-Chieh Fang @hungchiehfang
14 Followers 409 Following Visiting Intern @StanfordAILab | Undergrad @NTU_TW
Perepelitsyn Artem @perepelart
2 Followers 168 Following
valeria @ValequinVq
55 Followers 5K Following
amit saha @amit_saha_92
9 Followers 86 Following differential privacy, robustness, learning theory @ gt + adobe

Haoyang Weng @ElijahGalahad
123 Followers 253 Following Undergraduate in Yao class, Tsinghua. @Tsinghua_IIIS | @LeCARLab | Machine leaning for robotics | Applying for PhD 26 fall
Bryan @basikthings
46 Followers 2K Following
Mel Andrews @bayesianboy
30K Followers 9K Following PhD philosophy of science, AI ethics, mathematical modelling, machine learning, cognitive science, science reform.
Pranay Gupta @pranaygupta36
133 Followers 390 Following PhD @ Robotics Institute, Carnegie Mellon University.
Farhan Abrol @F_Abrol
186 Followers 425 Following Products to enhance human agency @southpkcommons, @buildexante, @AgencyFund Past: Public Health @Meta, Head of ML @PureStorage
Meena Jagadeesan @mjagadeesan25
759 Followers 188 Following Incoming Assistant Prof @Penn CS | Incoming Postdoc @StanfordAILab | Previously @Berkeley_ai @Harvard
Aayush Karan @aakaran31
473 Followers 748 Following PhD student @Harvard and @GoogleDeepMind | Algorithmic insights for generative machine learning | @PDSoros 2024 | Prev @citsecurities, @Apple
David Held @davheld
5K Followers 617 Following Associate Professor at Carnegie Mellon University | he/him
Danqi Chen @danqi_chen
17K Followers 786 Following Associate professor @princeton_nlp @princetonPLI @PrincetonCS. Previously: @facebookai, @stanfordnlp, @Tsinghua_Uni https://t.co/hLXgShMIPE
Stephanie Milani @steph_milani
4K Followers 322 Following Incoming Faculty Fellow @NYU_Courant, then Assistant Professor @JHUCompSci. Human-centered reinforcement learning & AI agents
Daniel Pfrommer @dpfroms
8 Followers 29 Following
Jason Ma @JasonMa2020
5K Followers 1K Following Co-founder @DynaRobotics Prev: @GoogleDeepMind, @NVIDIAAI, @MetaAI, @Penn, @Harvard.

Dayal Kalra @dayal_kalra
403 Followers 570 Following Research intern @AIatMeta FAIR; PhD student @umdcs; Past @UMD_IPST, BS-MS @IISERPune
Ali Jadbabaie @jababi
1K Followers 2K Following JR East Professor of Engineering. Head,Department of Civil and Environmental Engineering, Massachusetts Institute of Technology
Thomas Lew @thomas__lew
221 Followers 188 Following Research Scientist at @ToyotaResearch. Optimal Control, Machine Learning, Robotics. PhD @Stanford. Previously intern at @Google, @NASAJPL.
Polina Kirichenko @polkirichenko
4K Followers 1K Following Research Scientist at FAIR @AIatMeta & visiting researcher at Princeton @VisualAILab prev. PhD at New York University 🇺🇦
Boyuan Chen @BoyuanChen0
4K Followers 501 Following Researcher @OpenAI, core member of GPT image generation. PhD @MITEECS, where I worked on video world models, RL, and robotics. Ex @GoogleDeepMind, @berkeley_ai

Yilun Du @du_yilun
10K Followers 295 Following Assistant Professor at Harvard @KempnerInst + CS. PhD @MIT_CSAIL, BS MIT. Generative Models, Compositionality, Embodied Agents, Robot Learning.
Lingjie Liu @LingjieLiu1
4K Followers 917 Following Assistant Professor at UPenn. Research interests: Neural Scene Representation, Neural Rendering, Human Performance Modeling and Capture.
Vincent Sitzmann @vincesitzmann
16K Followers 308 Following Teaching AI to see, model, and interact with our 3D world. Assistant Professor @ MIT, leading the Scene Representation Group (https://t.co/h5gvhLYrtw).
Noam Brown @polynoamial
91K Followers 853 Following Researching reasoning @OpenAI | Co-created Libratus/Pluribus superhuman poker AIs, CICERO Diplomacy AI, and OpenAI o3 / o1 / 🍓 reasoning models
Andrej Risteski @risteski_a
3K Followers 2K Following Machine learning researcher. Associate Professor, ML department at CMU (@mldcmu).
Aviral Kumar @aviral_kumar2
5K Followers 355 Following Assistant Professor of CS & ML at @CarnegieMellon. Part-time Research Scientist Google. PhD from UC Berkeley.
Jacob Phillips @jacob_dphillips
1K Followers 1K Following Engineering Fellow @a16z, American Dynamism. prev ML @scale_AI, CTO @Themis_AI, AI + History @MIT
Yunzhu Li @YunzhuLiYZ
7K Followers 543 Following Assistant Professor of Computer Science @Columbia @ColumbiaCompSci, Postdoc from @Stanford @StanfordSVL, PhD from @MIT_CSAIL. #Robotics #Vision #Learning
Marvin Li @marvin_li03
274 Followers 698 Following Harvard '25 | Building theory for generative models
Tri Dao @tri_dao
32K Followers 632 Following Asst. Prof @PrincetonCS, Chief Scientist @togethercompute. Machine learning & systems.
David Dohan @dmdohan
12K Followers 2K Following reducing perplexity @openai | past: probabilistic programs, proteins, science & reasoning @ google brain 🧠
Paril Jain @pariljain
9K Followers 1K Following Founder/CTO @thebotcompany . Built Tesla FSD. Former Head of AI+Planning @Tesla
Tongzhou Wang @ssnl_tz
3K Followers 1K Following self-improvement operators @openai- codex, ? / quasimetric rl has all the right ideas.
Dylan HadfieldMenell @dhadfieldmenell
4K Followers 2K Following Associate Prof @MITEECS working on value (mis)alignment in AI systems; @[email protected]; he/him
CMU Robotics Institut... @CMU_Robotics
21K Followers 267 Following Pioneering the future of robotics since 1979. We’re transforming industries and everyday life through cutting-edge innovation and world-class education.
CMU Safe AI Lab @cmusafeai
271 Followers 390 Following Official Twitter account of CMU Safe AI Lab. News, research, and memes.
Quanquan Gu @QuanquanGu
16K Followers 2K Following Professor @UCLA, Pretraining and Scaling at ByteDance Seed | Recent work: Build AGI | Opinions are my own
Chelsea Finn @chelseabfinn
82K Followers 399 Following Asst Prof of CS & EE @Stanford Co-founder of Physical Intelligence @physical_int PhD from @Berkeley_EECS, EECS BS from @MIT
Ben Recht @beenwrekt
32K Followers 335 Following optimization. machine learning. uc berkeley. I blog at https://t.co/fkJujOPsJb The world won't end.
Sergey Levine @svlevine
108K Followers 133 Following Associate Professor at UC Berkeley Co-founder, Physical Intelligence
Sham Kakade @ShamKakade6
16K Followers 495 Following Harvard Professor. Full stack ML and AI. Co-director of the Kempner Institute for the Study of Artificial and Natural Intelligence.
Andrew Ilyas @andrew_ilyas
3K Followers 226 Following Stein Fellow @ Stanford Stats (current) | Assistant Prof @ CMU (incoming) | PhD @ MIT (prev)
Phillip Isola @phillip_isola
18K Followers 167 Following Associate Professor in EECS at MIT, trying to understand intelligence.
Ludwig Schmidt @lschmidt3
6K Followers 426 Following Assistant professor at @Stanford and member of the technical staff at @AnthropicAI.

Zachary Lipton @zacharylipton
63K Followers 2K Following Cofounder & CTO: @AbridgeHQ, Professor: CMU/@acmi_lab, Creator: @d2l_ai & https://t.co/QQt98VNLUp, Relapsing 🎷
Peter Holderrieth @peholderrieth
2K Followers 430 Following CS PhD student at @MIT • Generative Modeling and AI4Science • Prev: Stats/Neuro @OxfordUni• Math at @HCM_Bonn • Former: @AIatMeta
Stephen McAleer @McaleerStephen
11K Followers 998 Following Researching scalable AI safety at OpenAI
Martin Jinye Zhang @martinjzhang
975 Followers 858 Following Assistant professor @CMUCompBio | postdoc @HarvardChanSPH | PhD @Stanford_EE | statistical genetics & machine learning
Song Mei @Song__Mei
3K Followers 690 Following Assistant Professor at UC Berkeley, Department of Statistics and EECS. Researcher at OpenAI working on LLM training.
Keenan Crane @keenanisalive
37K Followers 483 Following Digital Geometer, Assoc. Prof. of Computer Science & Robotics @CarnegieMellon @SCSatCMU and member of the @GeomCollective. There are four lights.
Jakob Foerster @j_foerst
21K Followers 974 Following Assoc Prof in ML @UniofOxford @StAnnesCollege @FLAIR_Ox/ RS @MetaAI, 2x dad. Ex: (A)PM @Google, DivStrat @GS, ex intern: @GoogleDeepmind, @GoogleBrain, @OpenAI

Brett Adcock @adcock_brett
292K Followers 16 Following Founder @Figure_robot (AI Robots), @Cover_thz (Weapon Detection), @ArcherAviation (NYSE: ACHR), Vettery ($100M Exit)Trends for United States
You might like