Min Liu @minliu01
Researcher @SkildAI | MS in Machine Learning @CarnegieMellon minliu01.github.io San Mateo, CA Joined May 2023-
Tweets23
-
Followers101
-
Following388
-
Likes332

Self-Questioning Language Models: LLMs that learn to generate their own questions and answers via asymmetric self-play RL. There is no external training data – the only input is a single prompt specifying the topic.

Truly impressive to see a humanoid robot climbing stairs with this level of robustness and reliability!

Truly impressive to see a humanoid robot climbing stairs with this level of robustness and reliability!
I joined Skild AI late last year and we've been making swift progress towards more general robots! To record these videos we took the robot around town to locations it had never seen before with no prior preparation or planning.
I joined Skild AI late last year and we've been making swift progress towards more general robots! To record these videos we took the robot around town to locations it had never seen before with no prior preparation or planning.
Modern AI is confined to the digital world. At Skild AI, we are building towards AGI for the real world, unconstrained by robot type or task — a single, omni-bodied brain. Today, we are sharing our journey, starting with early milestones, with more to come in the weeks ahead.…
We’ve been building quietly — starting tomorrow, we go live. Here’s a teaser of what we did before Skild AI. It has shaped what’s coming next. 07/29. Stay tuned.

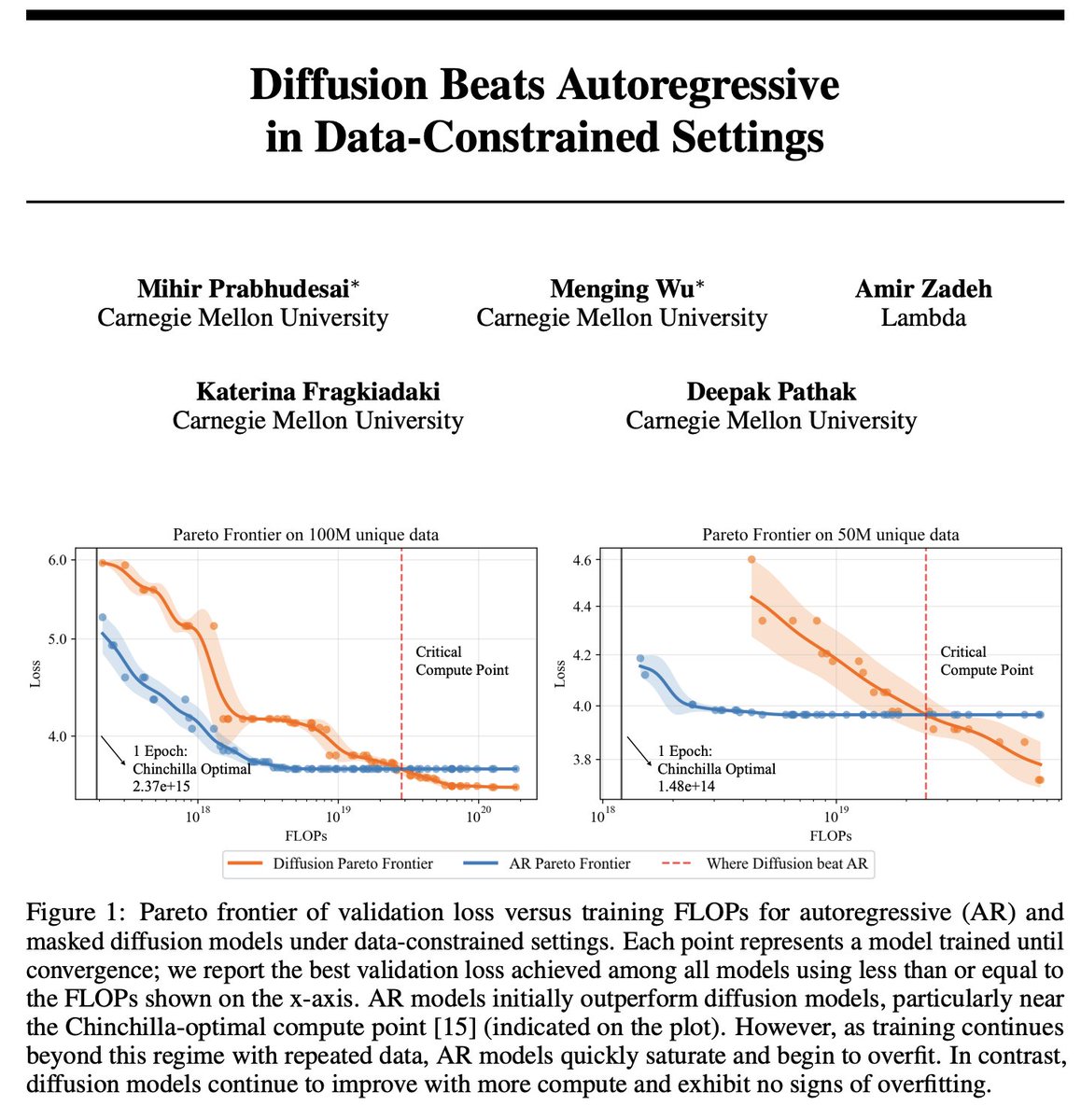
🚨 The era of infinite internet data is ending, So we ask: 👉 What’s the right generative modelling objective when data—not compute—is the bottleneck? TL;DR: ▶️Compute-constrained? Train Autoregressive models ▶️Data-constrained? Train Diffusion models Get ready for 🤿 1/n
🧠With the shift in humanoid control from pure RL to learning from demonstrations, we take a step back to unpack the landscape. 🔗breadli428.github.io/post/lfd/ 🚀Excited to share our blog post on Feature-based vs. GAN-based Learning from Demonstrations—when to use which, and why it…
Everyone knows action chunking is great for imitation learning. It turns out that we can extend its success to RL to better leverage prior data for improved exploration and online sample efficiency! colinqiyangli.github.io/qc/ The recipe to achieve this is incredibly simple. 🧵 1/N

How can we unlock generalized reasoning? ⚡️Introducing Energy-Based Transformers (EBTs), an approach that out-scales (feed-forward) transformers and unlocks generalized reasoning/thinking on any modality/problem without rewards. TLDR: - EBTs are the first model to outscale the…


TRI's latest Large Behavior Model (LBM) paper landed on arxiv last night! Check out our project website: toyotaresearchinstitute.github.io/lbm1/ One of our main goals for this paper was to put out a very careful and thorough study on the topic to help people understand the state of the…
Your bimanual manipulators might need a Robot Neck 🤖🦒 Introducing Vision in Action: Learning Active Perception from Human Demonstrations ViA learns task-specific, active perceptual strategies—such as searching, tracking, and focusing—directly from human demos, enabling robust…
(1/n) Since its publication in 2017, PPO has essentially become synonymous with RL. Today, we are excited to provide you with a better alternative - EPO.

Training robots for the open world needs diverse data But collecting robot demos in the wild is hard! Presenting DexWild 🙌🏕️ Human data collection system that works in diverse environments, without robots 💪🦾 Human + Robot Cotraining pipeline that unlocks generalization 🧵👇

Low-cost teleop systems have democratized robot data collection, but they lack any force feedback, making it challenging to teleoperate contact-rich tasks. Many robot arms provide force information — a critical yet underutilized modality in robot learning. We introduce: 1. 🦾A…

Excited to share that ManipGen has been accepted to ICRA 2025! We have released the code here: github.com/mihdalal/manip…. Run our generalist system on your robot today!
Excited to share that ManipGen has been accepted to ICRA 2025! We have released the code here: github.com/mihdalal/manip…. Run our generalist system on your robot today!
We introduce Dexterity Gen (DexGen), a foundation controller that enables unprecedented dexterous manipulation capabilities. For the first time, it allows human teleoperation of tasks such as using a pen, screwdriver, and syringe. Developed by @berkeley_ai and @metaai. A Thread.
Teaching bimanual robot hands to perform very complex tasks has been notoriously challenging. In our work, Bidex: Bimanual Dexterity for Complex Tasks, we’ve developed a low-cost system that completes a wide range of highly dexterous tasks in real-time. bidex-teleop.github.io
Can robots perform complex, multi-stage tasks like making breakfast or organizing a cluttered shelf based solely on text instructions? In our latest work ManipGen, we introduce local policy, a novel policy class that focuses on local interaction regions to enhance generalization…
Can robots perform complex, multi-stage tasks like making breakfast or organizing a cluttered shelf based solely on text instructions? In our latest work ManipGen, we introduce local policy, a novel policy class that focuses on local interaction regions to enhance generalization…
Human videos have long helped pre-train visual representations for robotics, but now with large-scale real-robot datasets, people can use in-domain data directly. Check out this work to see how it’s done!

Human videos have long helped pre-train visual representations for robotics, but now with large-scale real-robot datasets, people can use in-domain data directly. Check out this work to see how it’s done!
Can a single neural network policy generalize over poses, objects, obstacles, backgrounds, scene arrangements, in-hand objects, and start/goal states? Introducing Neural MP: A generalist policy for solving motion planning tasks in the real world 🤖 1/N

Alice Wilson @LandF3295_s
4 Followers 356 Following
Rishabh Jangir @RishabhJangir
459 Followers 948 Following Robotics AI Engineer at Skild AI | UCSD | UT Austin PhD dropout | I tweet about robotic learning, neuroscience and Football.
Kexin Shi @teenhaci
331 Followers 146 Following Robotics PhD @CMU_Robotics, Research Intern @SkildAI
Jayesh Singla @SinglaJayesh
81 Followers 78 Following Exploring the realm of ML and robotics | MSCS @ CMU | IIT Bombay CSE
Tarun Amarnath @tarun_am_i
97 Followers 104 Following Committed to the bit a bit too hard All opinions expressed are those of the little green smurf living inside my head MTS @SkildAI, prev. Cal 3x
Sandeep Routray @SandeepRoutra11
29 Followers 162 Following MS @cmumld | Elec. Eng. @IITKanpur Working on robotics and multimodal models
Marc Rigter @MarcRigter
755 Followers 620 Following Researcher @SkildAI. Previously: @MSFTResearch @oxfordrobots.
Chenfeng_X @Chenfeng_X
1K Followers 946 Following PhD @UCBerkeley, Incoming Assistant Professor @UTCompSci, Senior Researcher @togethercompute. Working on building cooler things with fewer dollars 😊
Xertu @Xertu653
10 Followers 902 Following

BacktestAlpha🇺🇸 @Vluluis4729293
23 Followers 2K Following 15-30% Monthly | 2 High-Conviction Stocks.Short-Term Gains: 15-20% in Days/Weeks.DM "JOIN" for WhatsApp Alerts. Live Trade Signals • Market Analysis
Jianren Wang @wang_jianren
1K Followers 531 Following Student of Nature | PhD @CMU_Robotics | Founding Researcher @SkildAI
Yifan Su @yifansu312
54 Followers 50 Following Member of Technical Staff @SkildAI | CS undergrad @ CMU
Haoran Hao @hr_hao11
38 Followers 27 Following MSR student at @CarnegieMellon (2025 Fall) Undergraguate at @NanjingUnivers1, Majoring in AI
Zhengyi “Zen” Luo @zhengyiluo
4K Followers 1K Following Research Scientist, GEAR @NvidiaAI | PhD @CMU_Robotics | Founder @CirkitDesign | CS @penn
Yuheng Qiu @QiuYuhengQiu
278 Followers 136 Following PhD Candidate at Carnegie Mellon University @AirLabCMU
Wenda Wang @wwd7086
255 Followers 2K Following Co-founder @UCR_robotics (humanoid)|Autonomy @Apple SPG | MRSD @CMU_Robotics 🤖 | ❤️ in the work


Anh Nguyen @NguynTu24128917
787 Followers 4K Following
Han Xue @HanXue012
632 Followers 1K Following Ph.D. student @sjtu1896 | Interesed in Robot Learning & Manipulation

Bob McGrew @bobmcgrewai
28K Followers 1K Following Learning new things. Former Chief Research Officer at OpenAI, early exec at Palantir, early employee at Paypal.
DanielDong @Nasimchs
139 Followers 4K Following
Stephanie Zhan @stephzhan
25K Followers 2K Following GP @Sequoia, early stage AI. On superintelligence quest. 1st partner to @linear @heytavus @mach_industries @middeskhq @replicatehq @reflection_ai @skildai
Haoyu Xiong @Haoyu_Xiong_
3K Followers 2K Following PhD student @MIT_CSAIL | Prev @Stanford @CMU_Robotics #Robot_Learning
Eliot Xing @etaoxing
363 Followers 292 Following phd student @cmu_robotics @scsatcmu • prev. @georgiatech • reinforcement learning, differentiable simulation, robotics
Kaifeng Zhang @kaiwynd
2K Followers 1K Following PhD student at Columbia University | Robotics | 3D Computer Vision
Bob M̶a̶r̶l̶e̶y�... @Shestadia
712 Followers 2K Following ٱلْحَمْدُ لِلَّٰهِ what's up? the sky All low agency roads lead to entropy
Pocket @PocketPriors
2K Followers 2K Following
Baoyu Li @BaoyuLi6
290 Followers 999 Following CS PhD @GeorgiaTech @ICatGT | Prev. MSCS @UofIllinois @siebelschool | Robot Learning 🤖

Zhao-Heng Yin @zhaohengyin
338 Followers 62 Following
Gao Jiawei @WinstonGu_
416 Followers 596 Following Final Year Undergrad at @Tsinghua_Uni; Previously @CMU_Robotics; Robot Learning and Embodied Agents; Applying for PhD (also job opportunities) at 2026 Fall!
NancyBirrell @62dSGzke7qTn216
68 Followers 3K Following
Eric Quidenus-Wahlfor... @ericw
10K Followers 2K Following Founder @SoundCloud @ridewithdance & https://t.co/TcUxfOdUkc Investor @lovable_dev @listenlabs @OmioGlobal @GetYourGuide @heartaerospace @normativeio and 50+ more
⅛ @Haner_yk
3 Followers 231 Following
Jared Mejia @jaredmejiaa
90 Followers 280 Following ml for robots @skildai, prev @mldcmu @CMU_Robotics
Chen Bao @chenbao191541
166 Followers 169 Following MS @CMU_Robotics | BS @sjtu1896 | RA UCSD @xiaolonw Lab, @ mvig-robotflow
Felix Wang @felixwyw
558 Followers 418 Following Member of Technical Staff @GeneralistAI_ PhD @MIT_CSAIL
Yiwen Hou @HouYiwen328
10 Followers 192 Following CS PhD @NUSingapore | Prev: BS/MS in CS @USTC | Robot Learning 🤖

Yulong Li @yulongli42
141 Followers 184 Following PhD student @MITEECS, MS @CMU_Robotics, Undergrad @Columbia
Quanting Xie @DanielXieee
553 Followers 883 Following PhD student @CMU CLAW_Lab @CMU_RI | Prev @Apple || #Embodied_AI #Robot_Learning #Humanoid #Dexterous_hand
Someone @Some1_Boring
37 Followers 3K Following
Jesse Thomason @_jessethomason_
3K Followers 1K Following Assistant Prof @CSatUSC leading the GLAMOR lab https://t.co/VQhcMiC8hE (he/him; 💖💜💙)

Ayudh Saxena @AyudhSaxen70526
10 Followers 490 Following
Heeger @GChongkai
468 Followers 639 Following PhD student of the National University of Singapore. Interested in robotics.
Yixuan Wang @YXWangBot
1K Followers 1K Following CS Ph.D. student @Columbia & Intern @AIatMeta | Prev. Boston Dynamics AI Institute, Google X #Vision #Robotics #Learning

Stephen James @stepjamUK
5K Followers 251 Following CEO @Neuracore_AI | ex-Principal Investigator at Dyson Robot Learning Lab | Postdoc @UCBerkeley w/ @pabbeel | PhD ICL w/ @ajdDavison


Chris Olah @ch402
122K Followers 181 Following Reverse engineering neural networks at @AnthropicAI. Previously @distillpub, OpenAI Clarity Team, Google Brain. Personal account.
Andrej Karpathy @karpathy
1.4M Followers 1K Following Building @EurekaLabsAI. Previously Director of AI @ Tesla, founding team @ OpenAI, CS231n/PhD @ Stanford. I like to train large deep neural nets.
Qianqian Wang @QianqianWang5
3K Followers 434 Following Postdoc at UC Berkeley and Visiting Researcher at Google. Former Ph.D. student at Cornell Tech. https://t.co/LyIdb5HmM9
Ethan He @EthanHe_42
15K Followers 815 Following AI @xai | prev @nvidia @AIatMeta @CarnegieMellon | 8k citations 5k GitHub stars | views are my own

Matei Zaharia @matei_zaharia
44K Followers 1K Following CTO at @Databricks and CS prof at @UCBerkeley. Working on data+AI, including @ApacheSpark, @DeltaLakeOSS, @MLflow, https://t.co/94gROE5Xa0. https://t.co/nmRYAKG0LZ

Devendra Chaplot @dchaplot
13K Followers 433 Following Building next-gen AI at @thinkymachines. Past: Founding team @MistralAI, RS at Facebook AI Research. Ph.D. @SCSatCMU, BTech @iitbombay CS.
Rishabh Jangir @RishabhJangir
459 Followers 948 Following Robotics AI Engineer at Skild AI | UCSD | UT Austin PhD dropout | I tweet about robotic learning, neuroscience and Football.
Abhinav Gupta @gupta_abhinav_
1K Followers 1 Following
Marc Rigter @MarcRigter
755 Followers 620 Following Researcher @SkildAI. Previously: @MSFTResearch @oxfordrobots.
Sandeep Routray @SandeepRoutra11
29 Followers 162 Following MS @cmumld | Elec. Eng. @IITKanpur Working on robotics and multimodal models
Tarun Amarnath @tarun_am_i
97 Followers 104 Following Committed to the bit a bit too hard All opinions expressed are those of the little green smurf living inside my head MTS @SkildAI, prev. Cal 3x

rohan anil @_arohan_
25K Followers 2K Following
gabriel @GabrielPeterss4
35K Followers 488 Following research sora at @OpenAI, previously at midjourney, swedish high school dropout

Chenhao Li @breadli428
4K Followers 390 Following Doctoral fellow @ETH_AI_Center | Embodied intelligence and robot learning @leggedrobotics & LAS | Prev. @MIT, @ETH_en, @MPI_IS, @EPFL_en, @mcgillu.
Misha Laskin @MishaLaskin
15K Followers 214 Following Co-founder, CEO at @reflection_ai. Prev: Research @DeepMind. Gemini RL team.
Chenfeng_X @Chenfeng_X
1K Followers 946 Following PhD @UCBerkeley, Incoming Assistant Professor @UTCompSci, Senior Researcher @togethercompute. Working on building cooler things with fewer dollars 😊
Haoru Xue @HaoruXue
2K Followers 349 Following PhD @berkeley_ai | intern @ NVIDIA GEAR | prev. @CMU_Robotics @LeCARLab | Robot Learning, Humanoids
Sherry Yang @sherryyangML
4K Followers 428 Following Research Scientist @GoogleDeepMind. Previously PhD @UCBerkeley, M.Eng. / B.S. @MIT.
Yi Zhou @Papagina_Yi
1K Followers 175 Following @AdobeResearch Scientist @USC Ph.D. Alumni @sjtu1896 Alumni Digital human, computer vision, computer graphics, deep learning

Devi Parikh @deviparikh
26K Followers 209 Following Co-CEO @yutori_ai. Join the waitlist at https://t.co/zD3StYi8db.
Dhruv Batra @DhruvBatraDB
19K Followers 608 Following Co-founder & Chief Scientist @yutori_ai. Prev: Senior Director leading FAIR Embodied AI @MetaAI and Professor @GeorgiaTech.

Generalist @GeneralistAI_
3K Followers 18 Following Generalist is an AI robotics company on a mission to make general-purpose robots a reality.
Yifan Su @yifansu312
54 Followers 50 Following Member of Technical Staff @SkildAI | CS undergrad @ CMU
Robotics: Science and... @RoboticsSciSys
9K Followers 90 Following Robotics: Science and Systems Conference #robotics #research

Yufei Ye @yufei_ye
1K Followers 720 Following
Yiming Dou @_YimingDou
763 Followers 895 Following Ph.D. student at UMich | B.Eng. from SJTU | Computer Vision, Multimodal, Robotics
Haoran Hao @hr_hao11
38 Followers 27 Following MSR student at @CarnegieMellon (2025 Fall) Undergraguate at @NanjingUnivers1, Majoring in AI
Jianren Wang @wang_jianren
1K Followers 531 Following Student of Nature | PhD @CMU_Robotics | Founding Researcher @SkildAI
Shuo Yang @ShuoYangAIR
2K Followers 45 Following CTO & Co-founder @ Mondo Robotics/ Ex Tesla | CMU PhD | Ex DJI
Yifeng Zhu @yifengzhu_ut
2K Followers 672 Following


Jack 🤖 @JacklouisP
8K Followers 4K Following 🤖 I write about robots @opterantech - reverse engineering insect brains @Robot__IQ - the best robot job board Previous - Founder of a robotics R&D agency
Seohong Park @seohong_park
4K Followers 532 Following Reinforcement learning | CS Ph.D. student @berkeley_ai
Allen Z. Ren @allenzren
2K Followers 782 Following Generalist robot policy @physical_int, PhD @Princeton
Yuheng Qiu @QiuYuhengQiu
278 Followers 136 Following PhD Candidate at Carnegie Mellon University @AirLabCMU
Angjoo Kanazawa @akanazawa
18K Followers 623 Following Assistant Professor at @Berkeley_EECS, @berkeley_ai. KAIR, @nerfstudioteam. Previously advised @WonderDynamics and @LumaLabsAI. she/her.
Arthur Allshire @arthurallshire
2K Followers 520 Following robotics & machine learning. PhD student @Berkeley_AI. prev EngSci @UofT / @NvidiaAI 🇮🇪 🇨🇦 🇦🇺🇨🇭🇨🇿Trends for United States
You might like